|
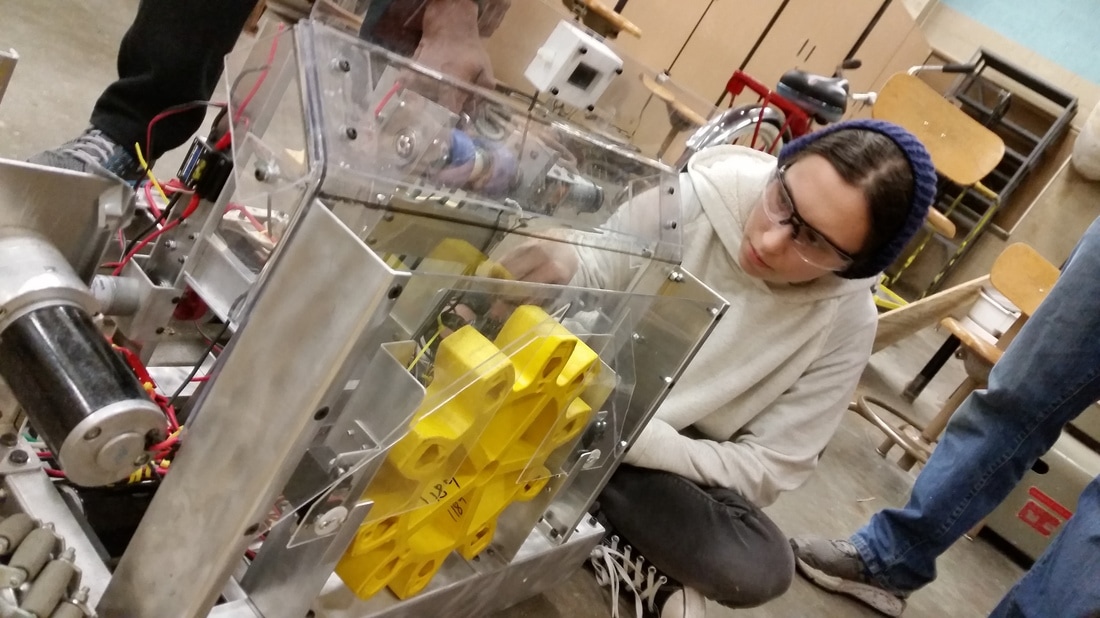
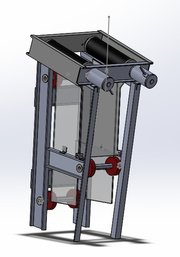
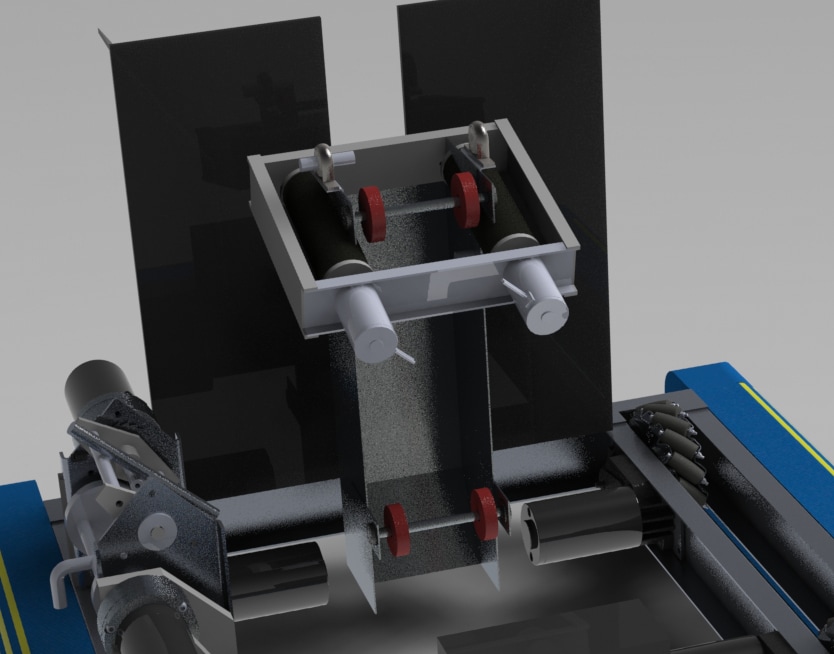
words by Hannah O'Grady, photos by Ben Uznis and media, renders by Design Team Throughout build season, our robot and team has undergone tremendous growth, from a collection of new and returning members whose handful of great ideas are converted into plans to a recognizable team whose core has been working seemingly non-stop for the past 6 days straight to complete a bag-ready robot. One major advancement is the Gear game-piece handling mechanism. Only a few weeks our gear mechanism was a rough prototype of plastic, tape, and scrap aluminum; but now, through the hard-work and dedication of our build and fabrication teams the gear mechanism has become a reality. The gear mechanism is a top-loading gear receiver, in which the gears are delivered from the hopper and brought to the airship to fix the rotors. Originally, the gear mechanism had aluminum lead-ins conceived to help the gears feed into the mechanism correctly, however throughout the testing process it was discovered that even without the lead-in the gears were fed in correctly 100% of the time. To save on time and materials the lead-ins were scrapped.
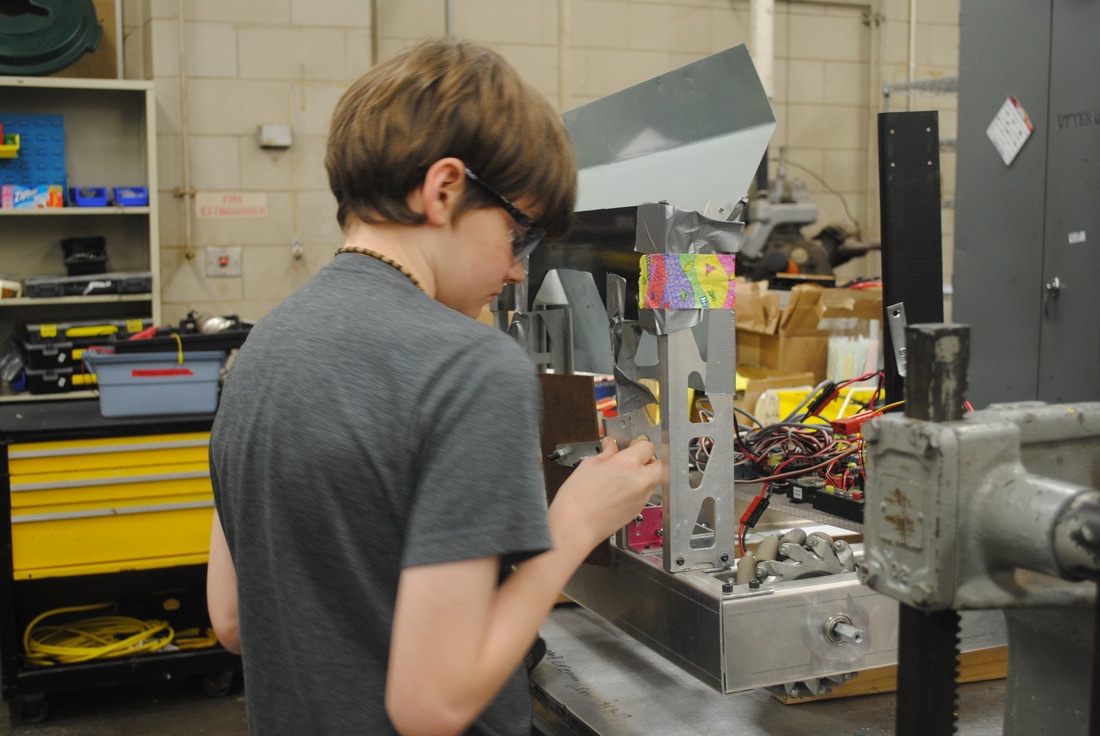
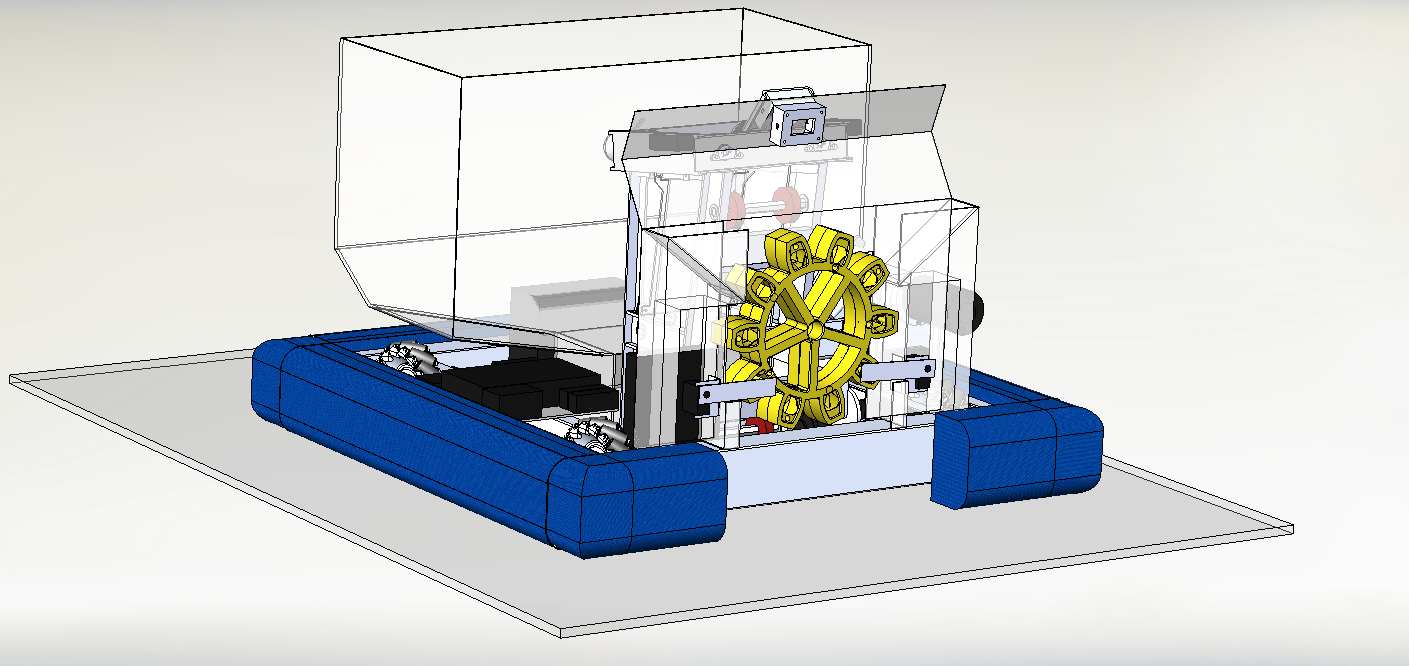
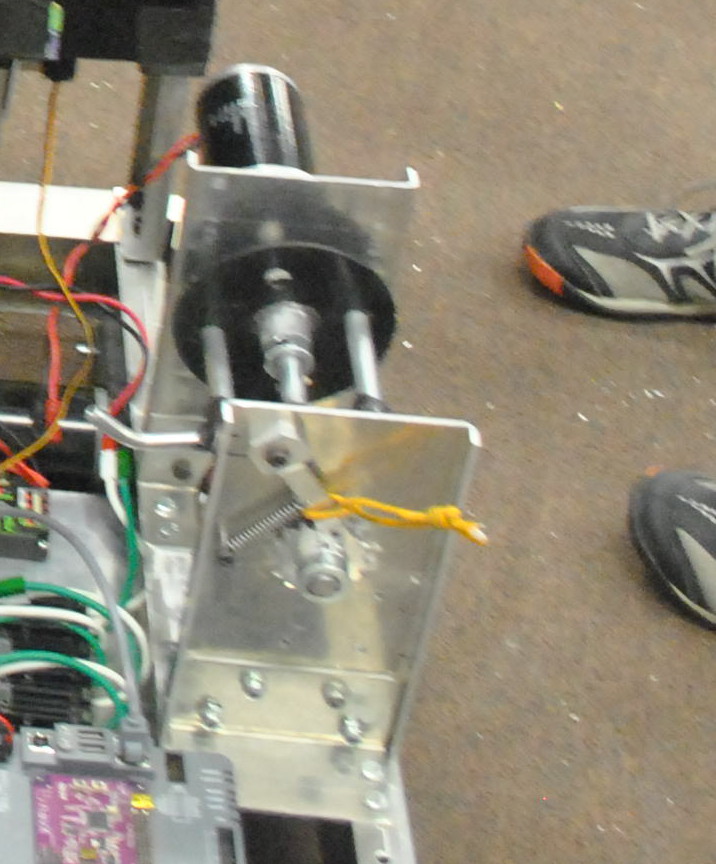
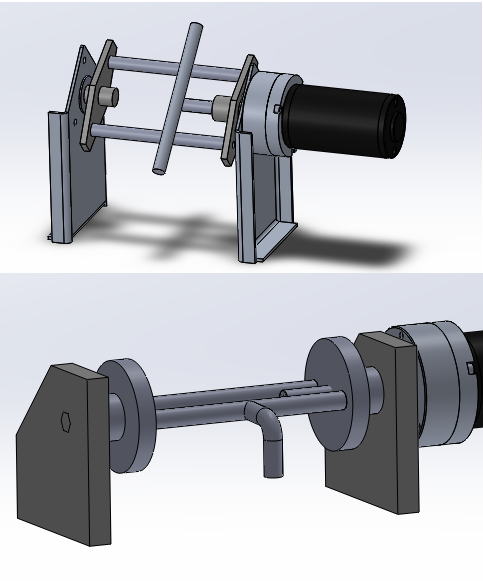
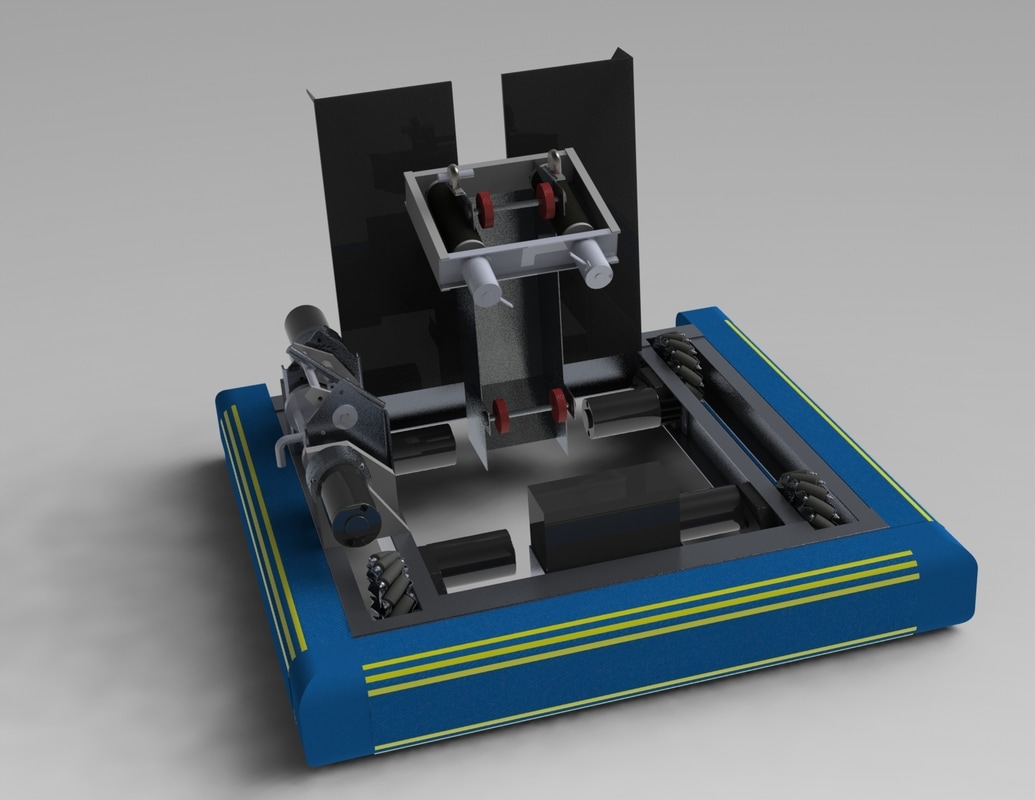
Build team worked together with our mentors to design and create supports of plexiglass to further stabilize the gear handler mounting to the robot. These supports are heated then bent into shape by members of build team, a process which takes hours to complete correctly but will greatly benefit the stability of the mechanism. The gear mechanism is made mainly of plexiglass with some metal supports so that the camera can see through it for accurate loading. The gear retention gates are also made of plexiglass which does render them breakable, so build has made several replacement pieces for the gates for repairs at competition. The gear loading mechanism is placed on the side of our robot across from the battery for strategic reasons, in addition to aiming to optimize power and weight distribution. The build and fabrication teams have also completed a climbing mechanism which is assured to be strong enough to raise our robot. The climbing mechanism has been tested several times and was found to work reliably. The climbing mechanism is built off of a spinning, ratcheting winch system to assure that our robot will remain in the air once raised. The team has high hopes for this lifter.
Last but not least is our fuel shooter. The parts of the shooter have mostly been fabricated and the position of the shooter on the robot has been established. What build is currently working on is deciding on the motor configuration for the shooting mechanism as well as attaching the top of the shooter to the shaft of the shooter. Fab is currently working on fabricating the last few pieces for the shooter. The team has decided on not creating a ground loading system for the shooter due to time constraints but we still have six inches of space once the bumpers are attached so build team has plans to develop a ground-loading system in time for our second competition. 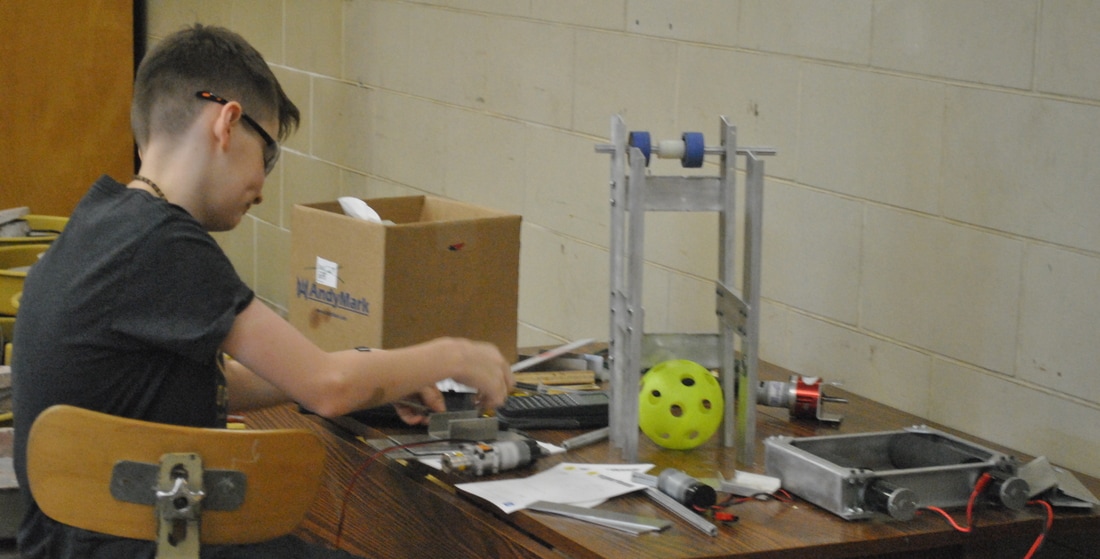
0 Comments
Leave a Reply. |
AuthorWe are the crazy, amazing, ingenious Gearheads! Archives
March 2020
Categories |

 RSS Feed
RSS Feed
